6軸協働ロボットねじ締め機

デバイスパラメータ
| モデル | GR-XFXZ950 |
| ロボットの到達範囲 | 950mm |
| ロボットの端部荷重 | 16キロ |
| 給餌プラットフォーム | 中央制御回転テーブル+サーボモーター |
| 給餌方法 | 打撃とスピレートは互換性がある |
| ロックアップ利回り | 99.95% |
| 動作電源 | AC220V |
| 作動空気源 | 0.4~0.7MPa |
| 力 | 約2.5KW |
| 座標方式を設定する | 視覚的なポジショニング |
| 外寸(L*W*H) | 1400*1900*1950mm |
| 重量(kg) | 800 |
| 状態 | 新しい |
| コアコンポーネントの保証 | 2年 |
デバイスの機能
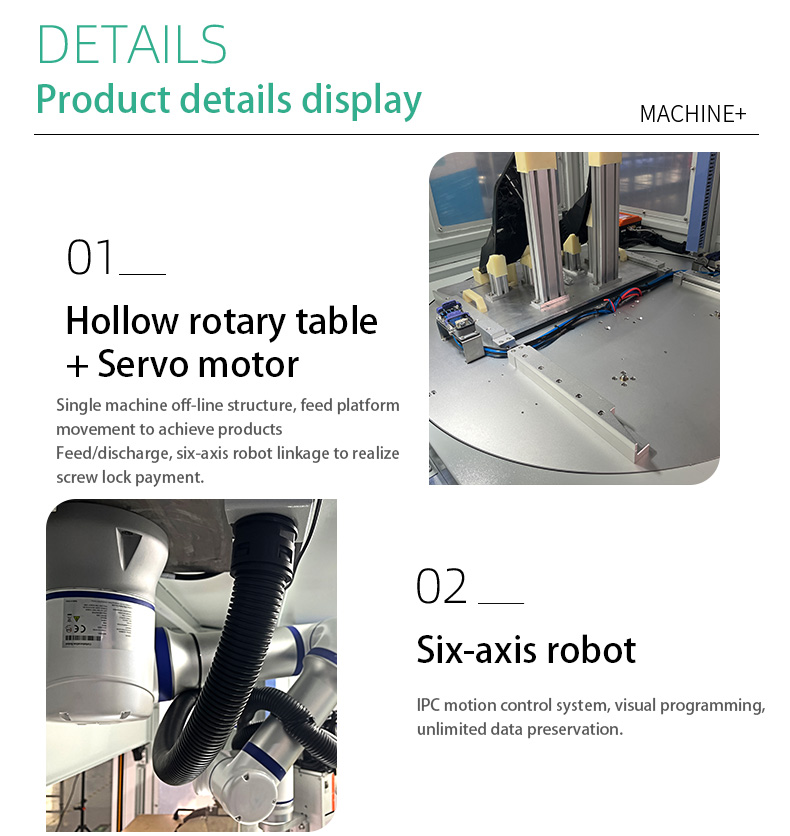
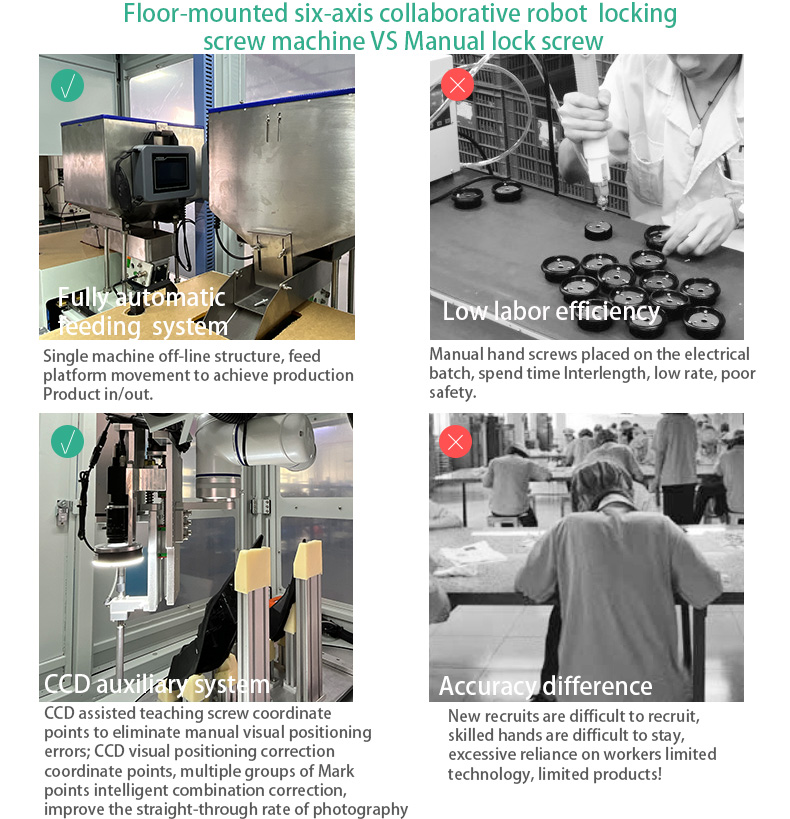
1.単一機械オフライン構造、製品の入出力を実現するためのフィードプラットフォームの動き、ネジロック支払いを実現するための6軸ロボットリンク
2.IPCモーション制御システム、ビジュアルプログラミング、無制限のデータストレージ。
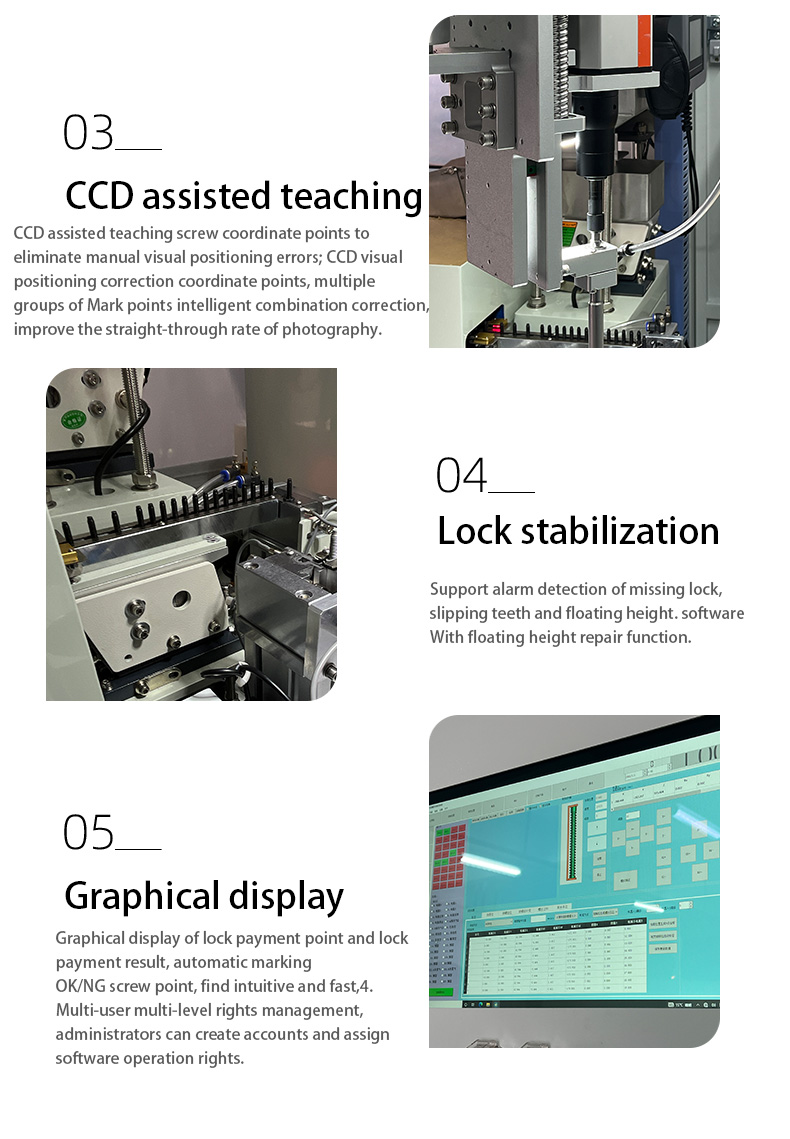
3. ロック支払いポイントとロック支払い結果をグラフィカルに表示し、OK/NG のネジポイントを自動的にマークして、直感的で高速に見つけます。
4. マルチユーザーおよびマルチレベルの権限管理、管理者はアカウントを作成し、ソフトウェア操作権限を割り当てることができます
5.CCD 補助ティーチング スクリュー座標ポイントにより、手動による視覚的な位置決めエラーが排除されます。CCD 視覚的な位置決め補正座標ポイント、複数のマーク ポイント グループのインテリジェントな組み合わせ補正により、写真の合格率が向上します。
6. ロックの紛失、歯の滑り、浮き上がりのアラーム検出に対応。ソフトウェアには浮き上がり修復機能も搭載されています。
7.Z軸は、レーザー変位センサー(浮上高さの測定)と下降圧力検出センサー(オプション)を使用して構成できます。
8.電動バッチには、HIOS電動バッチ、Qiliスピード電動バッチ、サーボ電動バッチ、インテリジェント電動バッチなどを装備できます(オプション)。
9.装置は、トルク、回転数、角度、トルク曲線、ロック状態などの顧客の要件に応じて MES をアップロードできます。
10.手動スキャンと自動スキャンを選択できます(オプション)
11. 生産データの追跡が可能で、ソフトウェアには品質管理ボードが付属しています。各種データのアップロードとダウンロードが可能です(オプション)。
12. 自動トルクポイントチェック、トルクポイントチェックの結果とクエリを保存します(オプション)。

詳細